En este tema estudiaremos las matrices como objeto matemático y su aplicación al estudio de los sistemas de ecuaciones lineales. Veremos sus propiedades fundamentales, las operaciones básicas, y una aplicación importante de estos conceptos: el Teorema de Rouché-Frobenius.
3. TEOREMA DE ROUCHÉ-FRÖBENIUS
3. TEOREMA DE ROUCHÉ-FRÖBENIUS
Antes de proceder a resolver un sistema de ecuaciones lineales, tenemos que dar respuesta a las siguientes preguntas: ¿El sistema tiene solución, es decir, es compatible? En caso afirmativo: ¿Tiene una solución o infinitas? Para responderlas, una de las herramientas que podemos utilizar es la que proporciona el Teorema de Rouché-Fröbenius, cuyo enunciado es el siguiente:
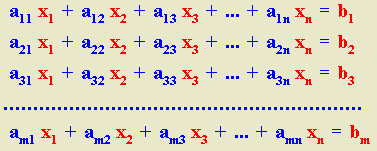
Consideremos un sistema de m ecuaciones lineales con n incógnitas, cuya expresión general es la siguiente:
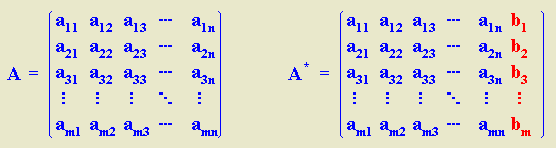
Sean A la matriz del sistema y A* la matriz ampliada del sistema (con los términos independientes).
La condición necesaria y suficiente para que un sistema de m ecuaciones lineales con n incógnitas sea compatible es que el rango de la matriz de los coeficientes de las incógnitas ( A ) sea igual al rango de la matriz ampliada con los términos independientes ( A* ). Es decir: rango (A) = rango (A*).
Si el valor común de los rangos coincide con el número de incógnitas, el sistema es compatible determinado. Si, por el contrario, el valor de los rangos es menor que el número de incógnitas el sistema es compatible indeterminado.
En resumen:
- Si rango (A) = rango (A*) = n (número de incógnitas), el sistema es compatible determinado (tiene una única solución).
- Si rango (A) = rango (A*) < n (número de incógnitas), el sistema es compatible indeterminado (tiene infinitas soluciones).
- Si rango (A) # rango (A*), el sistema es incompatible (no tiene solución).
Un caso particular es el de los sistemas homogéneos, es decir, aquellos en los que todos los términos independientes son nulos. Pues, en este caso, las matrices A y A* son semejantes a efectos del cálculo del rango, dado que la matriz A* es la matriz A a la que se le añade una columna de ceros, que podemos suprimir para calcular el rango. Por lo tanto, siempre se cumple que rango (A) = rango (A*). Esto quiere decir que todos los sistemas homogéneos son siempre compatibles. Se cumple:
- Si rango (A) = n (número de incógnitas), el sistema es compatible determinado. Tiene una única solución, que se conoce con el nombre de solución trivial. Es aquella en la que todas las incógnitas son nulas ( 0 ).
- Si rango (A) < n (número de incógnitas), el sistema es compatible indeterminado (tiene infinitas soluciones).
Una vez realizada la "discusión o identificación del sistema", aplicaremos alguno de los métodos que desarrollaremos en los epígrafes posteriores. No obstante, es preciso tener en cuenta las siguientes observaciones:
- Si el sistema es compatible determinado, el valor común de los rangos indica el número de ecuaciones principales, es decir, aquellas que no dependen de las restantes.
- Si el sistema es compatible indeterminado, (rango (A) = rango (A*) = k < n) el valor común de los rangos ( k ) indica tanto el número de ecuaciones independientes o principales, como el número de incógnitas principales. Las restantes incógnitas (no principales) n - k las pasaremos al segundo miembro formando un único término junto al término independiente. Siguiendo este procedimiento obtendremos un sistema de k ecuaciones lineales con k incógnitas (principales), al que aplicaremos uno de los procedimientos que estudiaremos en los siguientes apartados: Regla de Cramer, Método de Gauss o, por la matriz inversa.http://recursostic.educacion.es/descartes/web/materiales_didacticos/sistemas_de_ecuaciones_lineales_2bcnt/discusion_por_el_teorema_de_rouche.htm